For more cool real-world experimental videos, please scroll down!
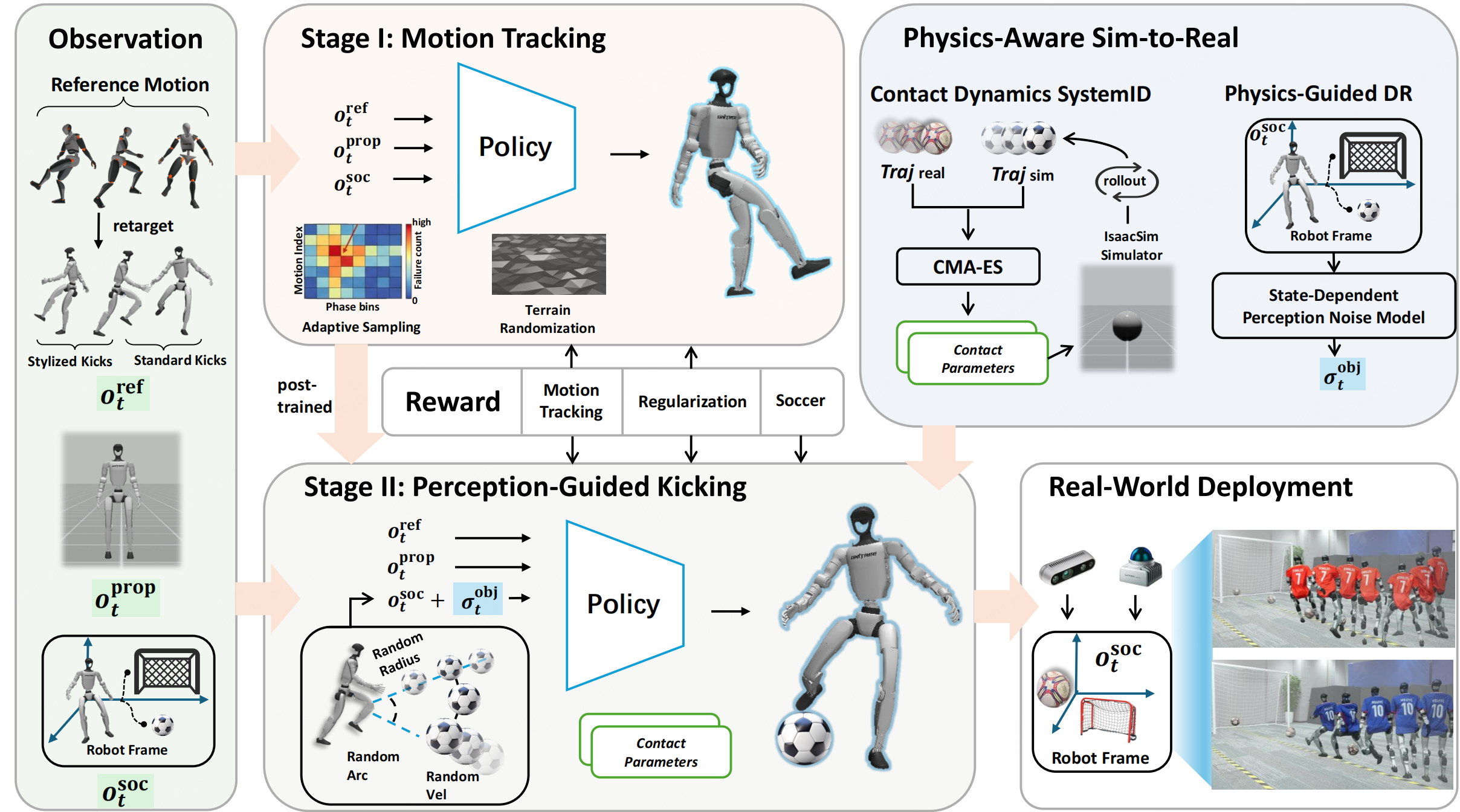
Soccer presents a significant challenge for humanoid robots, demanding tightly integrated perception-action capabilities for tasks like perception-guided kicking and whole-body balance control. Existing approaches suffer from inter-module instability in modular pipelines or conflicting training objectives in end-to-end frameworks. We propose Perception-Action integrated Decision-making (PAiD), a progressive architecture that decomposes soccer skill acquisition into three stages: motion-skill acquisition via human motion tracking, lightweight perception-action integration for positional generalization, and physics-aware sim-to-real transfer. This staged decomposition establishes stable foundational skills, avoids reward conflicts during perception integration, and minimizes sim-to-real gaps. Experiments on the Unitree G1 demonstrate high-fidelity human-like kicking with robust performance under diverse conditions—including static or rolling balls, various positions, and disturbances—while maintaining consistent execution across indoor and outdoor scenarios. Our divide-and-conquer strategy advances robust humanoid soccer capabilities and offers a scalable framework for complex embodied skill acquisition.
@misc{kong2026learningsoccerskillshumanoid,
title={Learning Soccer Skills for Humanoid Robots: A Progressive Perception-Action Framework},
author={Jipeng Kong and Xinzhe Liu and Yuhang Lin and Jinrui Han and Sören Schwertfeger and Chenjia Bai and Xuelong Li},
year={2026},
eprint={2602.05310},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2602.05310},
}

